PredMapNet
Future and Historical Reasoning for Consistent Online HD Vectorized Map Construction
Bo Lang*, Nirav Savaliya, Zhihao Zheng*, Jinglun Feng, Zheng-Hang Yeh, Mooi Choo Chuah*
Honda Research Institute USA, * Lehigh University
📄 Paper 💻Code
Overview
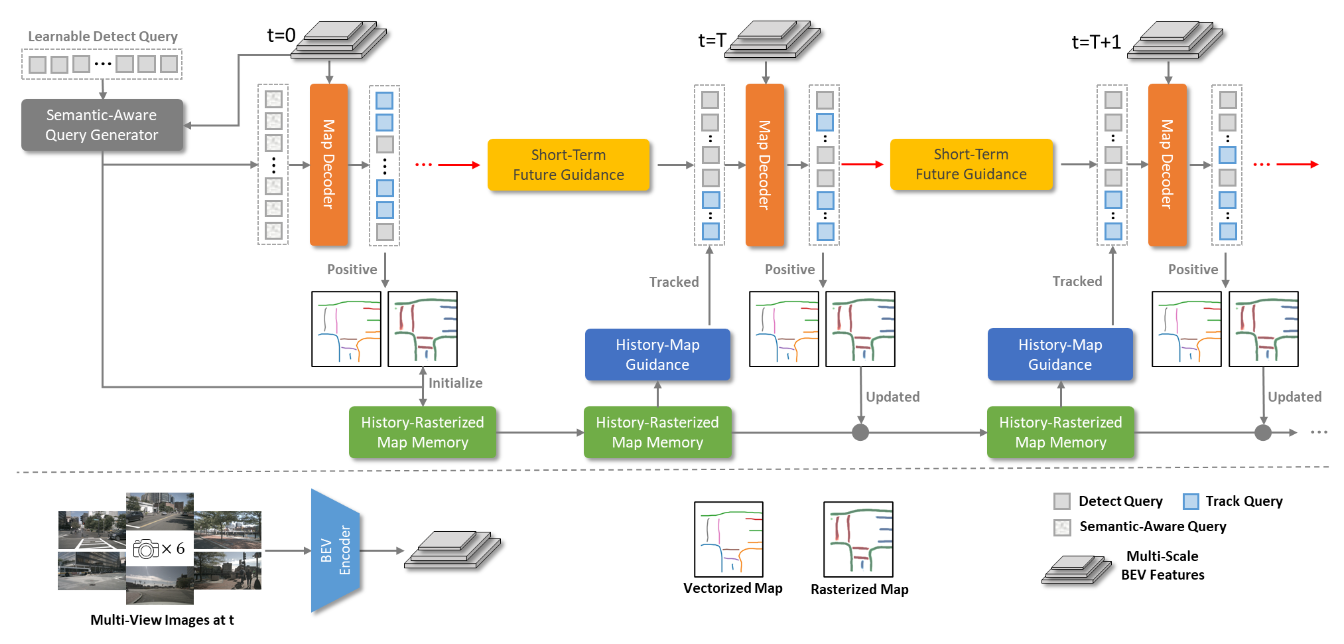
PredMapNet is an end-to-end framework for consistent online HD vectorized map construction designed for autonomous driving systems.
Unlike prior query-based methods that rely on random initialization and implicit temporal modeling, PredMapNet introduces explicit historical memory and short-term future reasoning to produce temporally stable and coherent map predictions across frames.
The framework improves both spatial alignment and temporal consistency, enabling reliable online vectorized HD mapping.
Motivation

High-definition (HD) vectorized maps are critical for:
- Autonomous navigation
- Motion planning
- Scene understanding
However, existing query-based map construction methods often:
- Use randomly initialized queries
- Lack explicit temporal modeling
- Produce temporally inconsistent predictions
- Struggle with stable instance tracking over time
PredMapNet addresses these limitations by integrating semantic-aware query generation, history map memory, and future motion priors into a unified framework.
Key Contributions
1: Semantic-Aware Query Generator (SAQG)
- Replaces random query initialization with semantically grounded queries
- Aligns queries with scene context using semantic masks
- Improves spatial precision and instance localization
2: History Rasterized Map Memory
- Maintains fine-grained instance-level rasterized maps from previous frames
- Provides explicit historical priors
- Supports stable long-term instance tracking
3: History-Map Guidance Module (HMG)
- Injects historical map memory into the decoder
- Guides query refinement using past instance information
- Enhances temporal continuity across frames
4: Short-Term Future Guidance (STFG)
- Predicts short-term future locations of map instances
- Incorporates motion priors from historical trajectories
- Further stabilizes predictions in dynamic scenes
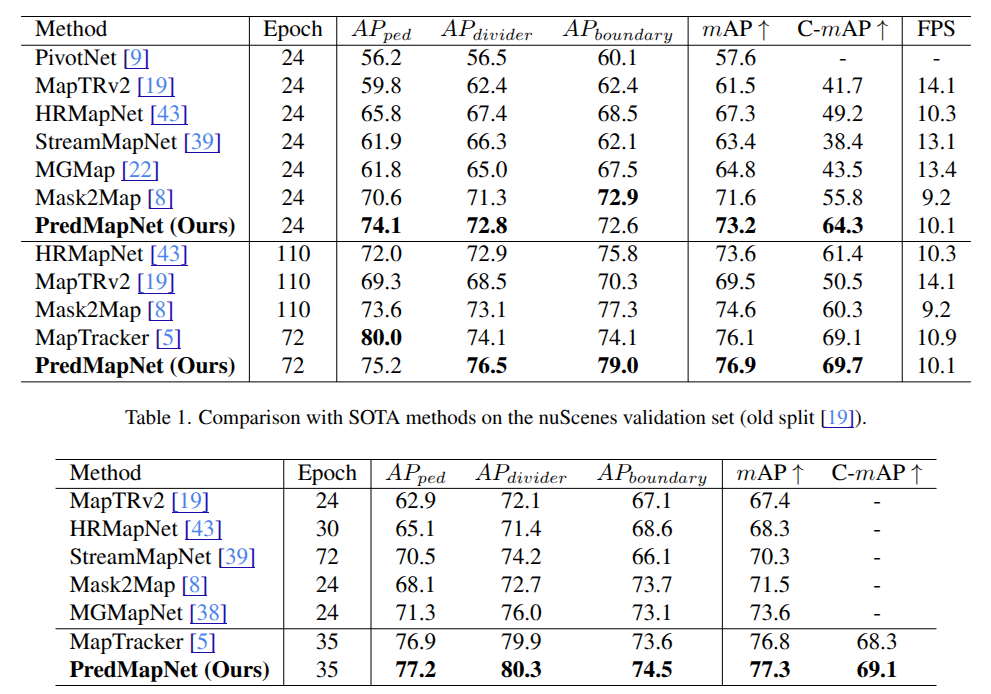
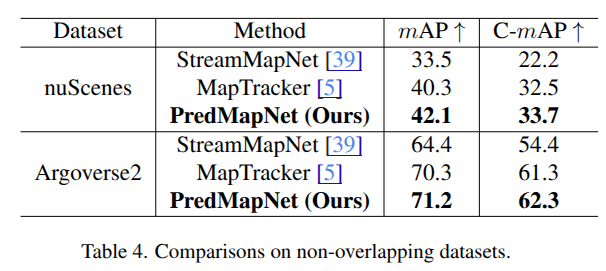
5: State-of-the-Art Performance
Links
Paper: https://arxiv.org/pdf/2602.16669
Code: Coming Soon
Cite our work:
If you find this work useful, please consider citing:
@article{predmapnet2026,
title={PredMapNet: Future and Historical Reasoning for Consistent Online HD Vectorized Map Construction},
author={Lang, Bo and Savaliya, Nirav and Zheng, Zhihao and Feng, Jinglun and Yeh, Zheng-Hang and Chuah, Mooi Choo},
booktitle = {Winter Conference on Applications of Computer Vision (WACV), 2026},
year={2026}
}